
Induction Motors
date: 2025-04-15
Induction Motors
Speed of Magnetic Field
\[n_{\text{sync}} = \frac{120 f_{\text{se}}}{P}\]Where
- \(f_{\text{se}}\): Stator frequency in Hz
- \(P\): Number of poles
Slip
\[s = \frac{n_{\text{sync}} - n_m}{n_{\text{sync}}}\]Where
- \(s\): slip
- \(n_{\text{sync}}\): speed of magnetic fields
- \(n_{m}\): mechanical shaft speed
In terms of angular velocity \(\omega\),
\[s = \frac{ {\omega}_{\text{sync}} - {\omega}_m }{ {\omega}_{\text{sync}} }\]Rotor Frequency
\[f_{\text{re}} = sf_{\text{se}}\] \[f_{\text{re}} = \frac{P}{120} \left(n_{\text{sync}} - n_m \right)\]Shaft Load Torque
\[{\tau}_{\text{load}} = \frac{P_{out}}{ {\omega}_m}\]Induction Motor Equivalent Circuit
Per-phase equivalent
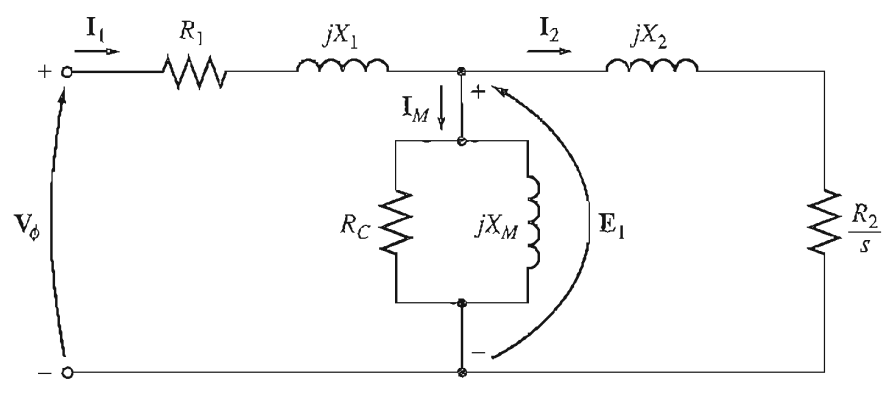
- \(R_1\): Stator resistance
- \(X_1\): Stator leakage reactance
- \(R_C\): Core resistance?
- \(X_M\): Magnetizing reactance
- \(R_2\): Rotor resistance
- \(X_2\): Rotor leakage reactance
- \(E_1\): Applied voltage, internal stator voltage
- \(V_{\phi}\): Input voltage to a phase
Power
Power losses to consider:
- Stator copper loss
- Stator core loss
- Rotor copper loss
- Friction, windage loss
- Stray loss (misc losses)
Power flow
\[P_{\text{in}} \rightarrow P_{\text{SCL}} \rightarrow P_{\text{core}} \rightarrow P_{\text{RCL}} \rightarrow P_{\text{F\&W}} \rightarrow P_{\text{misc}} \rightarrow P_{\text{out}}\]Where
\(P_{\text{SCL}}\) stator copper loss
\(P_{\text{core}}\) core losses
\(P_{\text{RCL}}\) rotor copper loss
\(P_{\text{F\&W}}\) friction and windage losses
\(P_{\text{misc}}\) stray losses
Air-gap power:
\[P_{\text{AG}} = P_{\text{in}} - P_{\text{SCL}} - P_{\text{core}}\]Converted power:
\[P_{\text{conv}} = P_{\text{AG}} - P_{\text{RCL}}\]Output power:
\[P_{\text{out}} = P_{\text{in}} - \left(P_{\text{SCL}} + P_{\text{core}} + P_{\text{RCL}} + P_{\text{F\&W}} + P_{\text{misc}}\right)\] \[P_{\text{out}} = P_{\text{conv}} - P_{\text{F\&W}} - P_{\text{misc}}\]Efficiency:
\[\eta = \frac{P_{\text{out}}}{P_{\text{in}}}\]
\[P_{\text{SCL}} = 3 I^2_1 R_1\] \[P_{\text{AG}} = 3 I^2_2 \frac{R_2}{s}\] \[P_{\text{RCL}} = 3 I^2_2 R_2\] \[P_{\text{conv}} = 3 I^2_2 R_2 \left(\frac{1-s}{s} \right) = P_{\text{AG}} (1-s)\]Torque
\[\tau_{\text{ind}} = \frac{P_{\text{conv}}}{ {\omega}_m} = \frac{P_{\text{AG}}}{ {\omega}_{\text{sync}}}\]
Maximum (Pullout) Torque
\[\tau_{\text{max}} = \frac{3 V^2_{\text{TH}}}{2 {\omega}_{\text{sync}} (R_{\text{TH}} + \sqrt{ R^2_{\text{TH}} + (X_{\text{TH}} + X_2)^2 }) }\]The slip at maximum torque is
\[s_{\text{max}\ \tau} = \frac{R_2}{\sqrt{R^2_{\text{TH}} + (X_{\text{TH}} + X_2)^2}}\]Where the equivalent Thévenin values are
\[Z_{\text{TH}} = \frac{jX_M (R_1 + jX_1)}{R_1 + j(X_1 + X_M)}\] \[V_{\text{TH}} = \frac{X_M}{\sqrt{R^2_1 + (X_1 + X_M)^2}} V_{\phi}\]
Type 1
Given:
- Motor specs: frequency \(f_{se}\), poles \(P\), power \(P_{out}\), Y-connection
- Slip \(s\)
Find:
- Synchronous speed \(n_{\text{sync}}\) in rpm
- Rotor speed \(n_m\) in rpm
- Rotor frequency \(f_{re}\) in Hz
- Shaft torque \({\tau}_{\text{load}}\)
1. Synchronous Speed \(n_{sync}\)
\[n_{\text{sync}} = \frac{120 f_{se}}{P}\]2. Rotor Speed \(n_m\)
\[n_m = (1-s) n_{\text{sync}}\]3. Rotor Frequency \(f_{re}\)
\[f_{re} = sf_{se}\]4. Shaft Torque \({\tau}_{load}\)
\[{\tau}_{\text{load}} = \frac{P_{out}}{ {\omega}_m}\]Type 2
Given:
- Motor specs:
- Voltage \(V_T\)
- Frequency \(f_{\text{se}}\)
- Power \(P_{\text{spec}}\)
- Three-phase
- Current \(I_L\)
- Stator Power Factor \({PF}_S\)
- Power losses \(P_{\text{SCL}},\ P_{\text{RCL}},\ P_{\text{FW}},\ P_{\text{core}},\ P_{\text{misc}}\)
Find:
- Air-gap power \(P_{\text{AG}}\)
- Power converted \(P_{\text{conv}}\)
- Output power \(P_{\text{out}}\)
- Efficiency \(\eta\)
1. Air-gap Power \(P_{\text{AG}}\)
First we need the input power:
\[P_{\text{in}} = \sqrt{3} V_T I_L \cos{\theta}\]Note: \(\cos{\theta} = {PF}_S\).
\(P_{\text{SCL}},\ P_{\text{core}}\) are given. Replace below:
\[P_{\text{AG}} = P_{\text{in}} - P_{\text{SCL}} - P_{\text{core}}\]2. Power Converted \(P_{\text{conv}}\)
\[P_{\text{conv}} = P_{\text{AG}} - P_{\text{RCL}}\]3. Output Power \(P_{\text{out}}\)
\[P_{\text{out}} = P_{\text{conv}} - P_{\text{F\&W}} - P_{\text{misc}}\]4. Efficiency \(\eta\)
\[\eta = \frac{P_{\text{out}}}{P_{\text{in}}}\]Type 3
Given:
- Motor specs:
- Voltage \(V_{\phi}\)
- Power \(P_{\text{rated}}\)
- Poles \(P\)
- Frequency \(f_{\text{se}}\)
- Y-connection
- Equivalent circuit values: \(R_1,\ X_1,\ R_2,\ X_2,\ X_M\)
- Power losses: \(P_{\text{core}},\ P_{\text{F\&W}},\ P_{\text{misc}}\)
- Ignoring \(R_C\) in the equivalent circuit
- Slip
Find:
- Line current \(I_L\)
- Stator power factor \({PF}_S\)
- Rotor power factor \({PF}_R\)
- Rotor frequency \(f_{\text{re}}\)
- Stator copper losses \(P_{\text{SCL}}\)
- Air-gap power \(P_{\text{AG}}\)
- Converted power \(P_{\text{conv}}\)
- Induced torque \(\tau_{\text{ind}}\)
- Load torque \(\tau_{\text{load}}\)
- Efficiency \(\eta\)
- Motor speed \(n_m,\ {\omega}_m\)
1. Line Current \(I_L\)
Consider the equivalent impedance of the circuit \(Z_{eq}\):
- \(R_1,\ X_1\) are in series with (2 || 3).
- \(X_2,\ R_2,\ R_2 \left(\frac{1-s}{s}\right)\) are in series.
- \(X_M\) is in parallel with (2).
Sum (2) as a series, calculate its parallel with (3), then sum the result in series with (1). Let the resulting impedance be \(Z_{eq}\).
Let the impedances (2 || 3) be \(Z_F\). Write this value down, you need it later for \(P_{\text{AG}}\).
Given a Y-connection, calculate \(\frac{V_{\phi}}{\sqrt{3}}\) for the phase voltage. Then use Ohm’s Law for the line current:
\[I_L = I_A = \frac{\frac{V_{\phi}}{\sqrt{3}} \angle{0°}}{Z_{eq}}\]The voltage is the reference phasor, hence the zero angle. The resulting current should have a negative phasor angle.
2. Stator Power Factor \({PF}_S\)
\[{PF}_S = cos {\theta}_s\]Where \({\theta}_s\) is the phasor angle of the current \(I_L\).
If \({\theta}_s < 0\), say the power factor is lagging. It should always be negative for this type of problem.
3. Rotor Power Factor \({PF}_R\)
Consider the branch (2) of the circuit: \(X_2,\ R_2,\ R_2 \left(\frac{1-s}{s}\right)\). Find its impedance angle:
\[{\theta}_R = \arctan{\frac{s X_2}{R_2}}\]Then use this angle for the power factor:
\[{PF}_R = cos {\theta}_R\]Like \({PF}_S,\ {PF}_R\) should also be lagging.
4. Rotor Frequency \(f_{\text{re}}\)
\[f_{\text{re}} = s f_{\text{se}}\]Usually, \(f_{\text{se}}\) is 50 or 60 Hz.
5. Stator Copper Losses \(P_{\text{SCL}}\)
\[P_{\text{SCL}} = 3 I^2_A R_1\]6. Air-gap Power \(P_{\text{AG}}\)
\[P_{\text{AG}} = 3 I^2_A R_F\]Where \(R_F\) is the real part of the impedance \(Z_F\) obtained in [1].
7. Converted Power \(P_{\text{conv}}\)
\[P_{\text{conv}} = P_{\text{AG}} (1-s)\]8. Induced Torque \(\tau_{\text{ind}}\)
For the induced torque, we need \({\omega}_{sync}\):
\[n_{\text{sync}} = \frac{120 f_{\text{se}}}{P}\]Where \(n_{\text{sync}}\) is in rpm.
\[{\omega}_{\text{sync}} = \frac{2 \pi n_{\text{sync}}}{60}\]Where \({\omega}_{\text{sync}}\) is in rad/s.
Then we find the induced torque:
\[\tau_{\text{ind}} = \frac{P_{\text{AG}}}{ {\omega}_{\text{sync}}}\]9. Load Torque \(\tau_{\text{load}}\)
We need the output power \(P_{\text{out}}\) and output speed \({\omega}_m\):
\[P_{\text{out}} = P_{\text{conv}} - P_{\text{F\&W}} - P_{\text{misc}}\]For \({\omega}_m\):
\[n_m = n_{\text{sync}} (1-s)\] \[{\omega}_m = \frac{2 \pi n_m}{60}\]Then the load torque is
\[{\tau}_{\text{load}} = \frac{P_{out}}{ {\omega}_m}\]10. Efficiency \(\eta\)
\[\eta = \frac{P_{\text{out}}}{P_{\text{in}}} = \frac{P_{\text{out}}}{3 V_{\phi} I_A \cos{ {\theta}_S}}\]11. Motor Speed \(n_m,\ {\omega}_m\)
We already got \(n_m\) and \({\omega}_m\) in [9].
Type 4
Given:
- Motor specs:
- Voltage \(V_{\phi}\)
- Poles \(P\)
- Frequency \(f_{\text{se}}\)
- Power delivered to a load \(P_{\text{load}}\)
- Motor speed \(n_m\)
Find:
- Slip \(s\)
- Induced torque \({\tau}_{\text{ind}}\)
- Motor speed \(n_m\), if the torque is doubled
- Power delivered to a load \(P_{\text{load}}\), if the torque is doubled
1. Slip \(s\)
We need the synchronous speed \(n_{\text{sync}}\):
\[n_{\text{sync}} = \frac{120 f_{\text{se}}}{P}\]Then the slip is
\[s = \frac{n_{\text{sync}} - n_m}{n_{\text{sync}}}\]2. Induced Torque \({\tau}_{\text{ind}}\)
Assuming no mechanical losses \(P_{\text{RCL}} = 0\) and \(P_{\text{conv}} = P_{\text{load}}\),
\[\tau_{\text{ind}} = \frac{P_{\text{conv}}}{ {\omega}_m}\]Where
\[{\omega}_m = \frac{2 \pi n_m}{60}\]3. Motor Speed \(n_m\)
Assuming low-slip region, the induced torque is directly proportional to slip. Therefore, if \(\tau_{\text{ind}}\) doubles, then \(s\) doubles too (approximate value).
Using \(n_{\text{sync}}\) and \(s\) as calculated in [1]:
\[n_m = n_{\text{sync}} (1- 2s)\]4. Load Power \(P_{\text{load}}\)
If \(\tau_{\text{ind}}\) doubles, then
\[P_{\text{load}} = P_{\text{conv}} = 2\tau_{\text{ind}} {\omega}_{mm}\]Where \({\omega}_{mm}\) is calculated from \(n_m\) in [3].